Camera Tools
The camera toolbox.
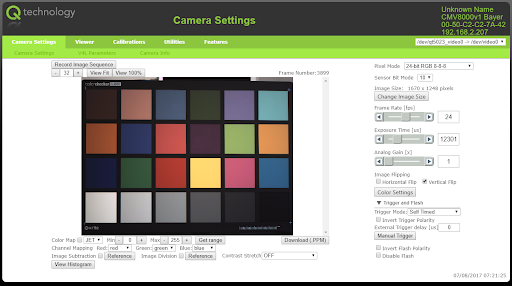
Camera Web UI
Allows easy access to the image stream and configuration of the cameras through a standard web browser, without installation of any special programs or drivers.
Point browser to http://<camera_ip> to open the web interface.
It presents a live preview (JPEG) and allows downloading images in the following formats: PPM, JPEG, TIFF, RAW.
Control all the camera features: like image formats, image size, regions of interest (cropping), frame rate, exposure time, triggers, gain, etc. All these features are controlled through the V4L2 API controls, which are also available controls from user applications.
Other special features built into the web interface are: auto white balancing, focus adjustment measures, histograms, sensor calibration, etc.
All configurations can be saved and restored for use in user applications or for setting up other cameras (XML).
Camera Web UI
The camera web interface runs only over http and not https.
If you have issues accessing the web interface try verifying that your browsers hasn't redirected to https instead of http.
Standard Linux tools
V4L2 Controls (v4l2-ctl) 1
An application to control video4linux drivers.
List video devices
v4l2-ctl --list-devices
Get all details of a video device
v4l2-ctl -d /dev/qtec/video0 --all
Show driver info
VIDIOC_QUERYCAP
v4l2-ctl -d /dev/qtec/video0 --info
Capture
VIDIOC_STREAMON
v4l2-ctl -d /dev/qtec/video0 \
--stream-mmap=8 --stream-count=0 --verbose --stream-to=file.raw
w=1664; h=34; t=615; l=64; f=RGB3; p=500; \
v4l2-ctl -d /dev/qtec/video0 \
--set-fmt-video width=${w},height=${h},pixelformat=${f} \
--set-crop top=${t},left=${l},width=${w},height=${h} \
--set-parm ${p} \
--stream-mmap=8 --stream-count=0 \
--verbose \
--set-ctrl exposure_time_absolute=300 \
--set-ctrl sensor_bit_mode=1
Video Format
VIDIOC_G_FMT
v4l2-ctl -d /dev/qtec/video0 --get-fmt-video
VIDIOC_S_FMT
v4l2-ctl -d /dev/qtec/video0 \
--set-fmt-video width=<IMG_WIDTH>,height=<IMG_HEIGHT>,pixelformat=<PIXEL_FORMAT_FOURCC>
VIDIOC_ENUM_FMT
v4l2-ctl -d /dev/qtec/video0 --list-formats-ext
Crop
VIDIOC_S_SELECTION
v4l2-ctl -d /dev/qtec/video0 \
--set-crop top=<CROP_TOP>,left=<CROP_LEFT>,width=<IMG_WIDTH>,height=<IMG_HEIGHT>
FPS
VIDIOC_S_PARM
v4l2-ctl -d /dev/qtec/video0 --set-parm <fps>
VIDIOC_G_PARM
v4l2-ctl -d /dev/qtec/video0 --get-parm
VIDIOC_ENUM_FRAMEINTERVALS
v4l2-ctl -d /dev/qtec/video0 --list-frameintervals width=<IMG_WIDTH>,height=<IMG_HEIGHT>,pixelformat=<PIXEL_FORMAT_FOURCC>
Controls
VIDIOC_QUERYCTRL
v4l2-ctl -d /dev/qtec/video0 --list-ctrls
VIDIOC_QUERYMENU
v4l2-ctl -d /dev/qtec/video0 --list-ctrls-menus
VIDIOC_G_EXT_CTRLS
v4l2-ctl -d /dev/qtec/video0 --get-ctrl <control_name>
VIDIOC_S_EXT_CTRLS
v4l2-ctl -d /dev/qtec/video0 --set-ctrl <control_name>=<control_value>
Yet Another V4L2 Test Application (yavta) 2
Options:
--capture=<NR_BUFFERS>--file=<OUTPUT_FILE_NAME>--set-control ‘<CTRL_NAME> <VALUE>’--format <FORMAT>
Capture infinite buffers
yavta /dev/qtec/video0 --capture
Capture 10 buffers
yavta /dev/qtec/video0 --capture=10
Request 10 buffers (VIDIOC_REQBUFS)
yavta /dev/qtec/video0 --capture -n 10
Qt V4L2 Control Panel Application (qv4l2) 3
Requires X11 forwarding (ssh -X) or screen connected directly to the camera.
qv4l2 -d /dev/qtec/video0
Reading/Writing Directly to the Device
Read (adjust bs to w*h*chs):
dd if=/dev/qtec/video0 of=frame.raw bs=452608 count=1
Write (adjust bs to w*h*chs):
dd if=xform_1664x34_cam2.dat.corrected.center of=/dev/qtec/xform_dist0 bs=452608
Streaming RAW Frames
1. Receive
Start listening on remote machine (adjust frame size, format and fps).
Note: Requires mplayer to be installed (apt-get install mplayer).
netcat -l <dest_port> | mplayer -demuxer rawvideo \
-rawvideo w=1664:h=17:format=rgb24 -fps 2 -
Otherwise the stream can fx be saved to a file.
netcat -l <port> > stream.raw
2. Stream
Then start streaming from camera
cat /dev/qtec/video0 | nc <dest_ip> <port>
It is also possible to stream using v4l2-ctl:
v4l2-ctl -d /dev/qtec/video0 --stream-mmap --stream-to=- | nc -p <dest_ip> <port>
Streaming server
Requires installing the full netcat (apt-get install netcat) on the camera
(The default netcat is the lightweight version from busybox which doesn't include listening capabilities).
Note: this is being changed, so in the future the full netcat will be installed by default.
1. Stream
Start server on camera listening for connections
cat /dev/qtec/video0 | netcat -l -p <port>
It is also possible to stream using v4l2-ctl:
v4l2-ctl -d /dev/qtec/video0 --stream-mmap --stream-to=- | nc -l -p <port>
2. Receive
Receive stream on client PC using VLC (adjust frame size, format and fps).
vlc --demux rawvideo --rawvid-chroma RV24 --rawvid-fps 24 --rawvid-width 1024 --rawvid-height 1024 tcp://10.10.150.227:9988
Possible --rawvid-chroma: RV24(RGB), GREY, I420, ...
https://wiki.videolan.org/Chroma/
Receiving with python:
TCP_IP = "10.100.10.100" # Update to reflect camera IP
TCP_PORT = 5000 # Update to reflect used port
BUFFER_SIZE = 1024
# Update to reflect camera format
FRAME_WIDTH = 1024
FRAME_HEIGHT = 1024
N_CHANNELS = 3 # RGB
N_BYTES = 1 # 8-bit
FRAME_SIZE = FRAME_WIDTH * FRAME_HEIGHT * N_BYTES * N_CHANNELS
sock = socket.socket(socket.AF_INET, # Internet
socket.SOCK_STREAM) # TCP
print("connecting")
try:
sock.connect((TCP_IP, TCP_PORT))
except ConnectionRefusedError:
print("Could not connect to camera")
n_imgs=0
while 1:
data = bytearray()
while len(data) < FRAME_SIZE:
try:
msg = sock.recv(FRAME_SIZE - len(data))
data.extend(msg)
except:
pass
n_imgs = n_imgs + 1
print("Got frame: " + str(n_imgs))
qtec tools
Tools/libraries created by qtec to help with camera configuration/interaction.
quark-ctl 4
A command line tool for interacting with qtec cameras.
It exposes the functionaly from quarklib on the cmd line.
And it also contains a few extra features like saving PNM images
and measuring image statistics (min/max/avg intensities, ...) and histogram.
quark-ctl --help
Usage: quark-ctl [OPTIONS] COMMAND [ARGS]...
Commandline tool to interact with a qtec camera.
Options:
--debug
--version Show the version and exit.
--help Show this message and exit.
Commands:
auto-exposure One-shot auto-exposure.
config Save/load/reset camera configuration.
exposure-sequence Create (and set) an exposure sequence.
save-image Save single/multiple/average frame(s).
stats View and export camera statistics (including...
Refer to the official docs for more details.
quarklib 5
A Python library with helper camera functions based on qamlib.
Includes functionality for:
- Saving/loading controls
- LUT interaction (FPGA based look-up tables)
- Saving PNM images
- Auto exposure
- Auto white-balance
Example:
import quarklib
device = "/dev/qtec/video0"
path = "config.json"
#to save all controls use 'controls = None'
controls = ["red gain", "green gain", " blue gain"]
#save settings to config file
quarklib.save(
path=path,
device=device,
controls=controls,
fmt=True,
crop=True,
framerate=True,
)
#load settings from config file
quarklib.load(
path=path,
device=device,
controls=True,
fmt=True,
crop=True,
framerate=True,
)
Refer to the official docs for more details or check the Examples section.
qamlib 6
A Python library for interacting with a V4L2 camera to get image data and control the camera.
Example:
import qamlib
cam = qamlib.Camera() # Opens /dev/qtec/video0
# Try to set exposure time (us)
cam.set_control("Exposure Time, Absolute", 1000)
exp = cam.get_control("Exposure Time, Absolute")
# Print the exposure time that we ended up with
print(f"Got exposure time {exp}us")
# Start and stop streaming with context manager
with cam:
meta, frame = cam.get_frame()
print(meta.sequence) # Frame number since start of streaming
Refer to the official docs for more details or check the Examples section.
gstreamer 7
Gstreamer is an open source multimedia framework.
Uses the concept of pipelines: src ! elem1 ! elem2 ! … ! sink
Has many plugins related to encoding/decoding and streaming. It is also possible to create your own plugins.
Examples of useful pipelines
v4l2src
Source element to capture video from v4l2 devices (like qtec cameras).
- set
num-buffers=Xin thev4l2srcin order to select how many frames should be captured. Otherwise it will capture until stopped.
gst-launch-1.0 v4l2src device=/dev/qtec/video0 num-buffers=10 ! fakesink
- set
selection=crop,left=<LEFT>,top=<TOP>,width=<WIDTH>,height=<HEIGHT>in order to adjust the cropping rectangle. Remember to also adjust the width and height in theCAPSafterwards.
gst-launch-1.0 v4l2src device=/dev/qtec/video0 selection=crop,left=64,top=387,width=2560,height=1800 ! video/x-raw, format=RGB, width=2560, height=1800, framerate=30/1 ! fakesink
- set
hw-center-crop=trueto auto-crop to the center of the sensor
gst-launch-1.0 v4l2src device=/dev/qtec/video0 hw-center-crop=true ! video/x-raw, format=RGB, width=100, height=100, framerate=30/1 ! fakesink
- set
extra-controls="c,<control_name>=<control_value>"in order to set v4l2 controls.
gst-launch-1.0 v4l2src device=/dev/qtec/video0 extra-controls="c,exposure_time_absolute=1000" ! fakesink
TCP Streaming
RAW
Must adjust the frame format (pixel format, width, height and fps) on the receiving side in order to "parse" the frames.
- Send:
gst-launch-1.0 v4l2src device=/dev/qtec/video0 ! video/x-raw, format=RGB, width=100, height=100, framerate=10/1 ! tcpserversink host=0.0.0.0 port=5000 --gst-debug=*:3
- Receive:
gst-launch-1.0 tcpclientsrc host=<cam_ip> port=5000 ! rawvideoparse width=100 height=100 framerate=10/1 format=rgb ! queue ! videoconvert ! queue ! ximagesink sync=0
- Receive with
vlc:
vlc --demux rawvideo --rawvid-chroma RV24 --rawvid-fps 20 --rawvid-width 1024 --rawvid-height 1024 tcp://<cam_ip>:5000
Possible --rawvid-chroma: RV24(RGB), GREY, I420, ...
https://wiki.videolan.org/Chroma/
JPEG
- Send:
gst-launch-1.0 v4l2src device=/dev/qtec/video0 ! video/x-raw, format=RGB, width=100, height=100, framerate=10/1 ! queue ! jpegenc ! queue ! tcpserversink host=0.0.0.0 port=5000 --gst-debug=*:3
- Receive:
gst-launch-1.0 tcpclientsrc host=<cam_ip> port=5000 ! jpegparse ! jpegdec ! queue ! videoconvert ! queue ! ximagesink sync=0
- Receive with
vlc:
vlc tcp://<cam_ip>:5000
UDP Streaming
RAW
Must adjust the frame format (pixel format, width, height and fps) on the receiving side in order to "parse" the frames.
- Send:
gst-launch-1.0 -v v4l2src device=/dev/qtec/video0 ! video/x-raw, format=BGRA, width=320, height=240, framerate=30/1 ! rtpvrawpay ! udpsink host="<target_ip>" port="5000" -v
- Receive:
gst-launch-1.0 udpsrc port="5000" caps = "application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)RAW, sampling=(string)BGRA, depth=(string)8, width=(string)320, height=(string)240, payload=(int)96, a-framerate=(string)30" ! rtpvrawdepay ! videoconvert ! queue ! xvimagesink sync=false
JPEG
- Send:
gst-launch-1.0 rtpbin name=rbin v4l2src device=/dev/qtec/video0 ! video/x-raw,framerate=10/1,format=RGB,width=1280,height=720 ! videoconvert ! timeoverlay ! jpegenc ! rtpjpegpay ! rbin.send_rtp_sink_0 rbin.send_rtp_src_0 ! udpsink port=5000 host=127.0.0.1 sync=0 rbin.send_rtcp_src_0 ! udpsink port=5001 host=127.0.0.1 sync=false async=false udpsrc port=5003 address=127.0.0.1 ! rbin.recv_rtcp_sink_0
- Receive:
gst-launch-1.0 udpsrc address=<cam_ip> port=5000 ! application/x-rtp, media=video, clock-rate=90000, encoding-name=JPEG, payload=26 ! rtpbin ! rtpjpegdepay ! jpegdec ! videoconvert ! autovideosink sync=0
File Saving (RAW)
The IO of CFAST/USB pendrive is normally too slow for saving RAW files.
Therefore it is recommended to save to the RAM instead (/tmp), though it will have more limited space (4GB max, ~30secs in "normal" conditions).
Or use an SSD for longer recordings.
Multiple RAW files
Must adjust the frame format (pixel format, width, height and fps) when playing in order to "parse" the frames.
- Record:
GST_DEBUG=*:3 gst-launch-1.0 v4l2src device=/dev/qtec/video0 num-buffers=10 ! video/x-raw, format=RGB, width=100, height=100, framerate=10/1 ! multifilesink location=/tmp/test%d.raw -v
- Play:
GST_DEBUG=*:3 gst-launch-1.0 multifilesrc location=/tmp/test%d.raw ! videoparse format=rgb width=100, height=100, framerate=10/1 ! clocksync ! videoconvert ! ximagesink sync=0
Single RAW file
- Record:
GST_DEBUG=*:3 gst-launch-1.0 v4l2src device=/dev/qtec/video0 num-buffers=10 ! video/x-raw,format=RGB,width=100,height=100,framerate=10/1 ! filesink location=/tmp/test.raw
- Play:
gst-launch-1.0 filesrc location=/tmp/test.raw ! videoparse format=rgb width=100 height=100 framerate=10/1 ! clocksync ! videoconvert ! ximagesink sync=0
- Play with
vlc:
vlc --demux rawvideo --rawvid-chroma RV24 --rawvid-fps 10 --rawvid-width 100 --rawvid-height 100 test.raw
AVI container
So we don't need to use videoparse and adjust CAPS (frame format and size) as it gets saved into the container.
Note: avimux unfortunately only supports a small number of pixel formats: { YUY2, I420, BGR, BGRx, BGRA, GRAY8, UYVY, v210 }.
- Record:
GST_DEBUG=*:3 gst-launch-1.0 v4l2src device=/dev/qtec/video0 num-buffers=10 ! video/x-raw,format=BGR,width=100,height=100,framerate=10/1 ! avimux ! filesink location=/tmp/test.avi
- Play:
filesrc location=/tmp/test.avi ! avidemux ! clocksync ! videoconvert ! ximagesink sync=0
- Play with
vlc:
vlc test.avi
- Extract files:
gst-launch-1.0 filesrc location=/tmp/test.avi ! avidemux ! multifilesink location=/tmp/test%d.raw
or
gst-launch-1.0 filesrc location=/tmp/test.avi ! avidemux ! queue ! pnmenc ! multifilesink location=/tmp/test%d.pnm
Multiple PNM files
Supported pixel formats: { RGB, GRAY8, GRAY16_BE, GRAY16_LE }.
- Record:
GST_DEBUG=*:3 gst-launch-1.0 v4l2src device=/dev/qtec/video0 num-buffers=10 ! video/x-raw,format=RGB,width=100,height=100,framerate=10/1 ! queue ! pnmenc ! multifilesink location=/tmp/test%d.pnm -v
- Play:
GST_DEBUG=*:3 gst-launch-1.0 multifilesrc location=/tmp/test%d.ppm ! pnmdec ! videorate ! video/x-raw,framerate=10/1 ! clocksync ! videoconvert ! ximagesink sync=0
File Saving (JPEG)
JPEG in AVI container (MJPEG)
- Record:
GST_DEBUG=*:3 gst-launch-1.0 v4l2src io-mode=2 hw-center-crop=true device=/dev/qtec/video0 num-buffers=10 ! video/x-raw,format=RGB,width=100,height=100,framerate=10/1 ! queue leaky=2 max-size-bytes=0 max-size-time=0 max-size-buffers=5 ! videoconvert ! jpegenc ! avimux ! filesink location=/tmp/test_jpeg.avi
- Play:
GST_DEBUG=*:3 gst-launch-1.0 filesrc location=/tmp/test_jpeg.avi ! avidemux ! jpegdec ! clocksync ! videoconvert ! ximagesink sync=0
- Play with
vlc:
vlc test_jpeg.avi
- Extract files:
gst-launch-1.0 filesrc location=/tmp/test_jpeg.avi ! avidemux ! multifilesink location=/tmp/test%d.jpeg
gstreamer-python-utils 8
Collection of classes and examples, that can be used to speed up development of applications written in Python using Gstreamer as the base API.
It contains some base Gstreamer classes for building and managing pipelines. As well as some example applications using those classes.
These examples are helper applications that can be used to record and play image streams. Those streams can be used for project development.
from py_gst.pipeline import GstPipeline
from py_gst.pipeline import GstError
pipe = None
try:
pipe = GstPipeline("videotestsrc num-buffers=10 ! fakesink")
pipe.run()
while pipe.is_running():
time.sleep(1)
except GstError as err:
sys.stderr.write(f"{err}")
GstPipeline.cleanup(pipe)
return 1
from py_gst.appsink import AppSinkPipe
from py_gst.pipeline import GstError
pipe = None
try:
pipe = AppSinkPipe("videotestsrc num-buffers=10 ! appsink", True, 10)
pipe.run()
buffers = []
while pipe.is_running():
buffer = pipe.pop()
if buffer:
buffers.append(buffer)
print(f"Got: {len(buffers)} buffers")
except GstError as err:
sys.stderr.write(f"{err}")
GstPipeline.cleanup(gst_pipe)
return 1